














解决方案


1550nm半导体激光雷达/测距雷达解决方案
激光雷达(LiDAR)是通过发射激光束并接收回波,精确获取目标距离、速度、三维坐标与形态的主动探测系统,核心优势是毫米级测距精度、全天候主动感知、直接输出 3D 点云。激光雷达按激光波长分类为:905nm和1550nm激光波段。
海报图")
1550nm特点:人眼更安全、功率上限高、探测更远(>300m)、抗干扰强;成本高、探测器(InGaAs)贵。
1550nm波段因其卓越的人眼安全特性(允许更高的发射功率)和更优的抗干扰能力,成为无人驾驶出租车(Robotaxi)和远距离测绘的首选,也是超远距、高灵敏的无人驾驶与特种测绘主流方案。
一、核心器件选型要点
1、光源/激光器(1550 nm)
1.1形式:
l 直接调制 DFB/DBR 激光器(中等功率、窄线宽,适合相干系统)
l 种子激光器 + 光纤放大器(MOPA 结构):种子为半导体激光器,后接 EDFA 或其他光纤放大器。
1.2关键指标:线宽、相干长度、频率调谐线性度(FMCW)、输出功率。
2、光电探测器(1550 nm)
2.1首选:InGaAs/InP APD,在 950–1700 nm 范围有良好响应。
2.2常见形态:InGaAs APD + TIA 前放集成模块,用于 1550 nm 激光雷达/测距仪。
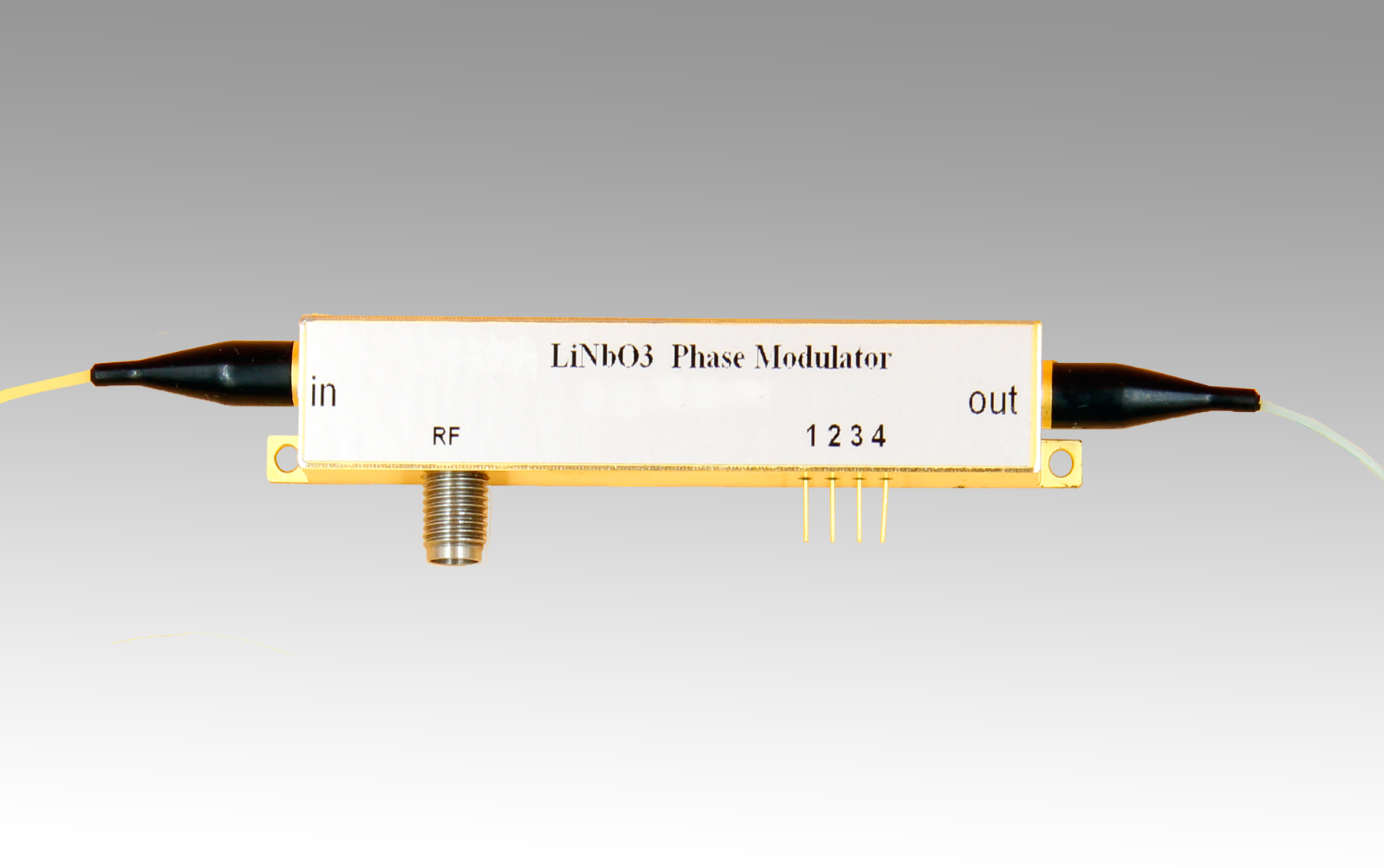
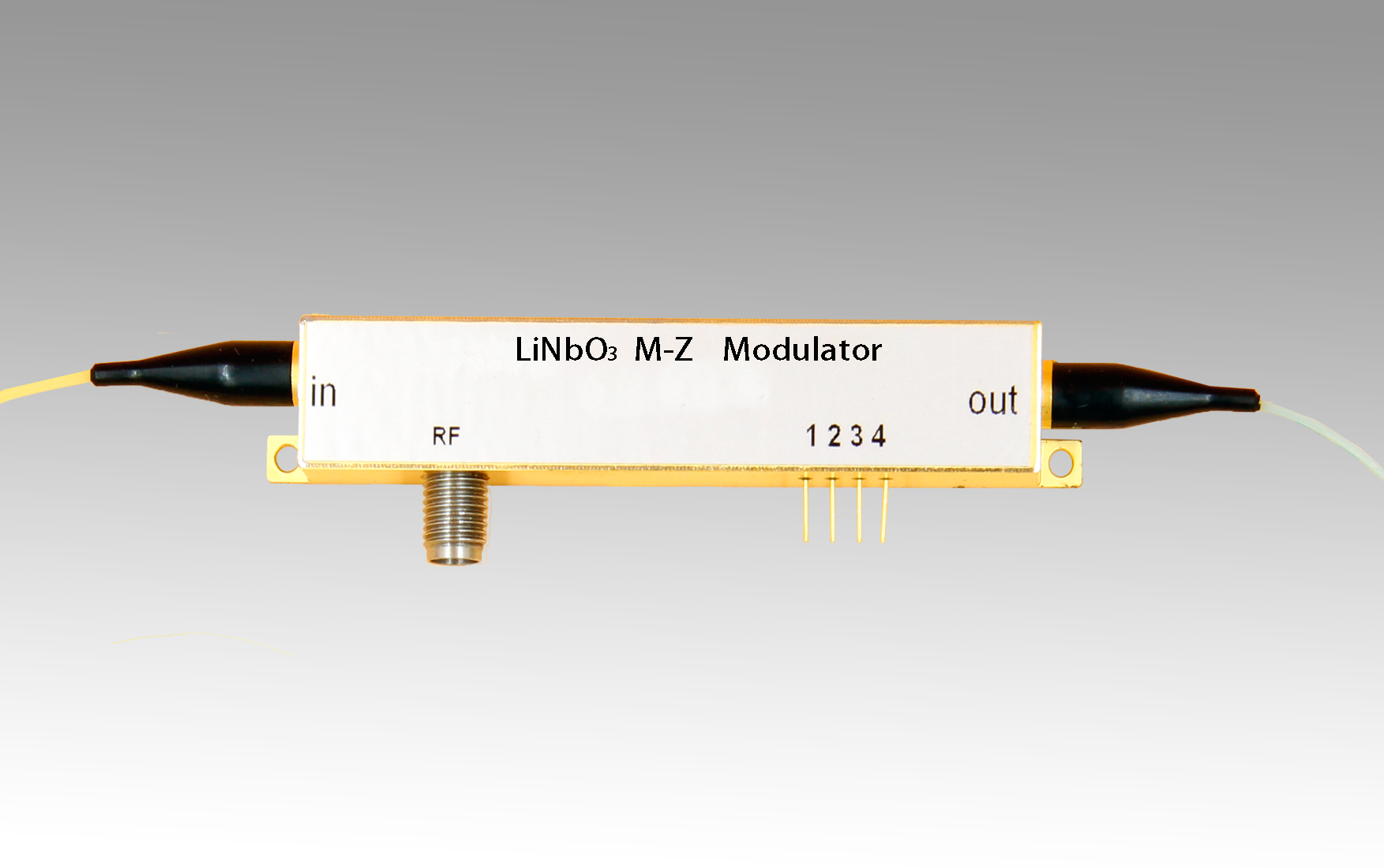
3、电光相位调制器 / 强度调制器
3.1在1550nm,常用LiNbO₃或InP基电光调制器(EOM):
l 强度调制器(MZM):可产生高消光比、宽带脉冲或线性调频( chirp)。
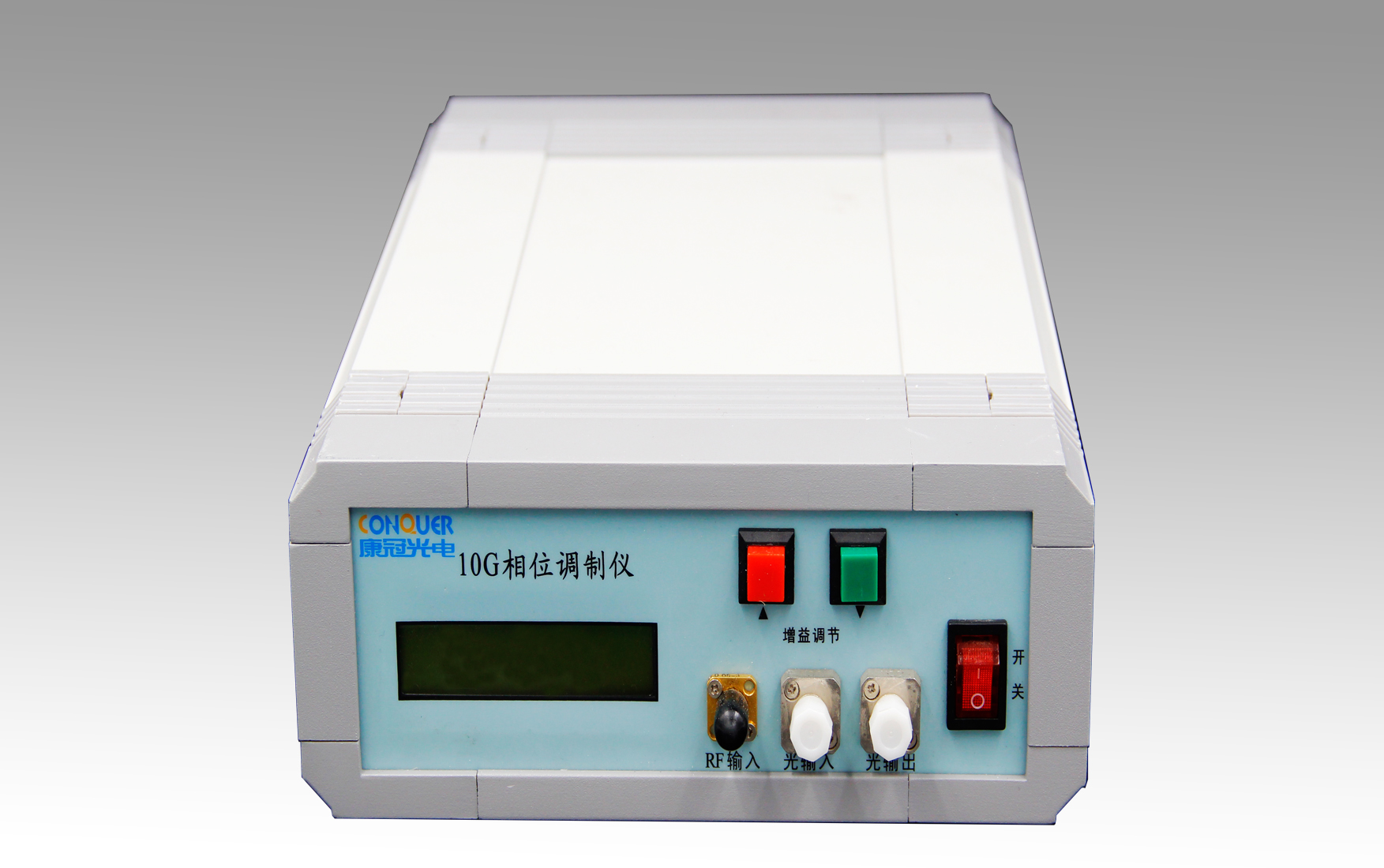
l 相位调制器:用于相干系统(如在种子激光上进行相位调制)。
3.2典型带宽:几 GHz 至十几 GHz,可实现几十 GHz 的调频范围。
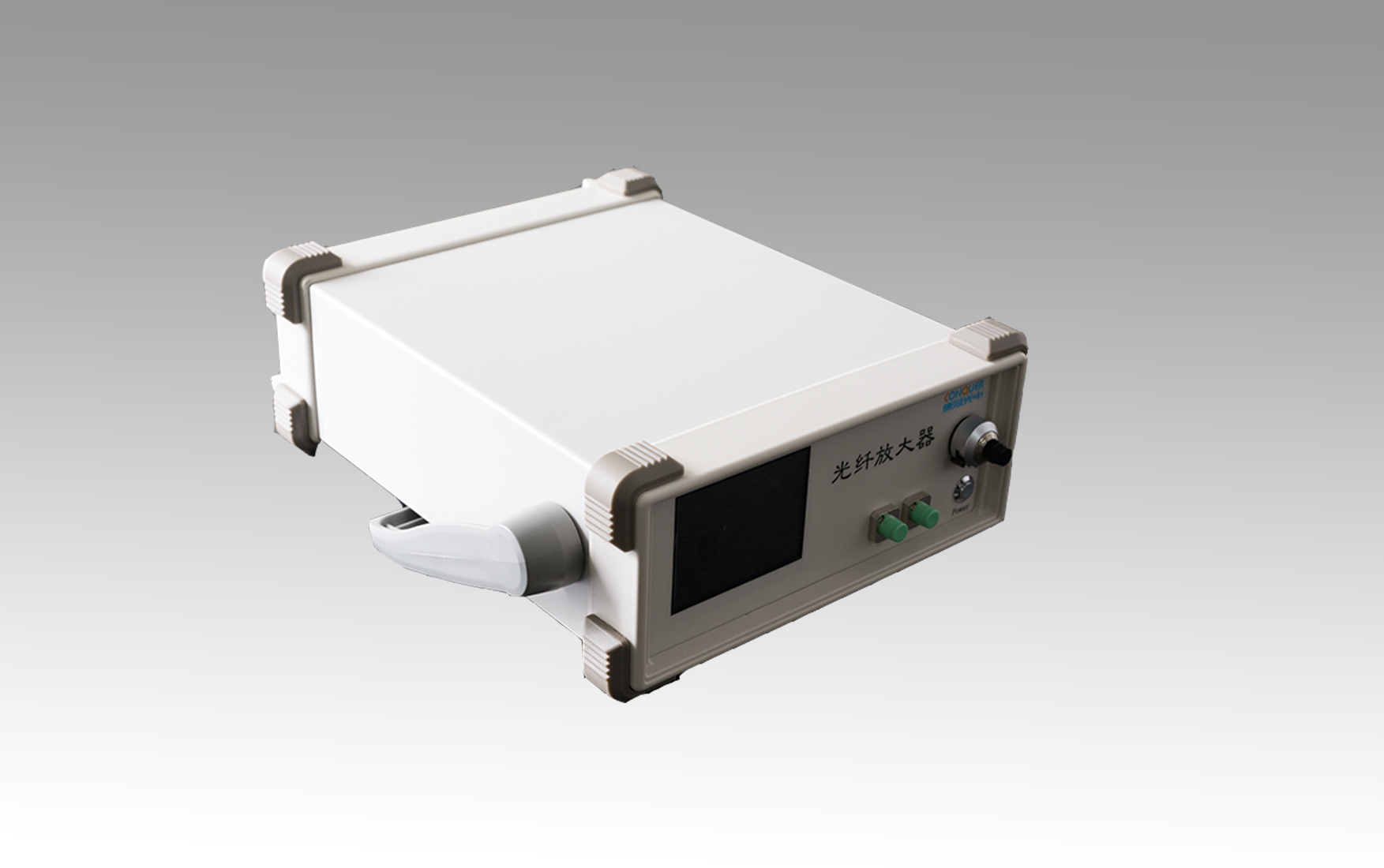
4、光放大器(1550 nm)
4.1 EDFA(掺铒光纤放大器):最成熟,可在 C 波段(1530–1565 nm)提供高增益、高功率。
4.2在 MOPA 结构中,种子信号经多级 EDFA 放大,实现高峰值功率脉冲输出。
4.3 EDFA 既可做功率放大(booster),也可做前置放大(预放)以改善接收灵敏度。
二、典型系统架构 1:1550 nm 脉冲 ToF / MOPA 激光雷达
1、原理框图

1.1模块说明:
l 光源:1550 nm DFB/DBR 半导体激光器作为种子光源。
l 调制器:电光强度调制器(MZM)在时域产生脉冲或对连续光进行开关;也可进行相位/频率调制(FMCW)。
l 光放大器:EDFA 作为功率放大器,将种子信号放大到 W 级峰值功率,同时保持窄脉宽和较好波形。
l 探测器:InGaAs APD + TIA 接收模块。
l 计算:ToF测距。
2、关键计算公式
2.1距离公式

2.2链路预算(以峰值功率表示)
发射平均功率:

其中τ为脉宽,frep 为重复频率
接收功率仍使用雷达方程形式(扩展目标):
在 1550 nm,需要额外考虑:
l EDFA 噪声(ASE)带来的噪声基底;
2.3 APD SNR
公式形式同上,只是:
l 响应度 R 在 1550 nm 不同;
l 暗电流 Id通常更大;
l 背景光电流 Ibg通常较小(太阳光谱在1550 nm较弱)
三、典型系统架构2:1550 nm FMCW 相干激光雷达
FMCW 是 1550 nm 的典型“高端”体制,可同时获得距离和速度(多普勒频移),并利用相干探测提高灵敏度。
1、原理框图
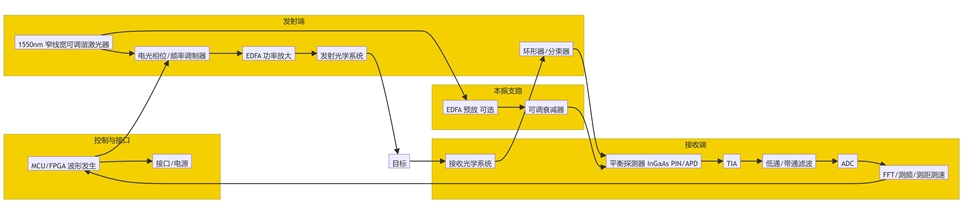
1.1模块说明:
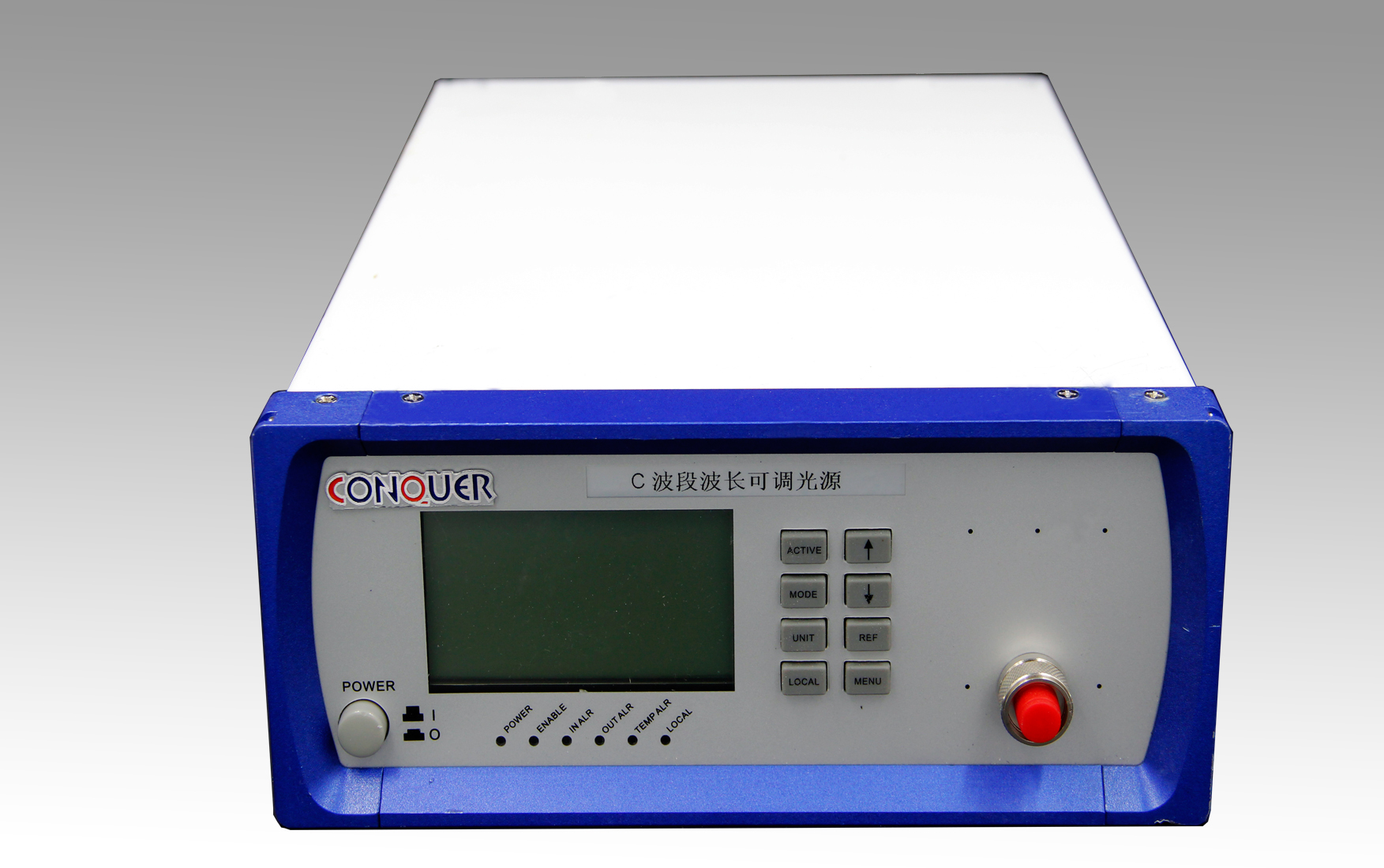
l 光源:窄线宽可调谐半导体激光器(或 DFB + 外调制),产生线性调频连续波。
l 调制器:电光相位调制器实现线性调频(chirp),或通过直接电流调制调谐。
l 光放大器:EDFA 做功率放大(发射端)和/或本振支路预放。
l 探测器:平衡探测器(一对 InGaAs PIN 或 APD),实现外差/零差探测,抑制相对强度噪声(RIN)
l 信号处理:对中频信号做 FFT,得到距离/速度。
2、关键计算公式
2.1距离–频率关系
对三角波调频连续波

l B:扫频带宽(例如 3–4 GHz)
l T:一个扫频周期(上行或下行)
l fIF:中频频率
测得 fIF即可算出R。
2.2多普勒频移(测速)
对于运动目标,多普勒频移:

l v:径向速度
l λ:中心波长(约 1550 nm)
通过上、下行扫频的频率差,可同时解出距离和速度。
2.3相干探测 SNR(简化)
外差探测下,信号电流:

PLO:本振功率
Ps:信号功率
R:探测器响应度
噪声主要包括:散粒噪声(由本振功率主导)、热噪声和放大器噪声。在足够强的本振下,可实现散粒噪声限制探测,显著提高 SNR。
四、典型应用场景
l 长距车载激光雷达(前向长距、高速公路场景)。
l 机载/无人机测绘激光雷达。
l FMCW 相干激光雷达(同时测距与测速)。
l 长距测距仪、风速测量(相干 lidar)等。
产品推荐






